是目前国内集研发、生产、销售、服务于
一体的专业化减速机企业
一体的专业化减速机企业
服务热线:




工作原理
第1减速部…正齿轮减速机构
第2减速部…差动齿轮减速机构
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。
这个转动被输出到第2减速部的轴。
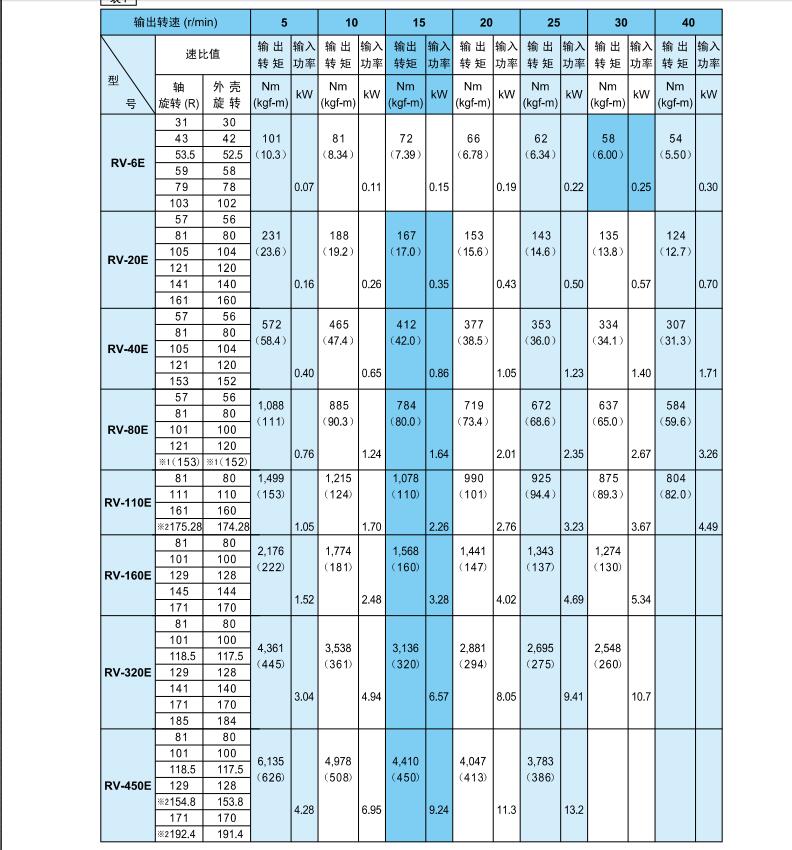
RV-E型减速机有很多使用方法。旋转方向与速比如下图所示。
第1减速部与第2减速部相加得到的减速比i因使用方法而异,可以根据下列公式所示的速比值算出。
R :速比值
Z2:直齿轮的齿数
Z4:针齿根数 i:减速比
RV减速机的传动装置是由第一级渐开线圆柱齿轮行星减速机构和第二级摆线针轮行星减速机构两部分组成,为一封闭差动轮系如图2.2为其结构示意图。主动的太阳轮1与输入轴相连,如果渐开线中心轮1顺时针方向旋转,它将带动三个呈120°布置的行星轮2在绕中心轮轴心公转的同时还有逆时针方向自转,三个曲柄轴3与行星轮2相固连而同速转动,两片相位差180°的摆线轮4铰接在三个曲柄轴上,并与固定的针轮相啮合,在其轴线绕针轮轴线公转的同时,还将反方向自转,即顺时针转动。输出机构(即行星架)6由装在其上的三对曲柄轴支撑轴承来推动,把摆线轮上的自转矢量以1:1的速比传递出来。




